
Temperatuur effecten op motor prestaties
18-07-2019
Voor elke toepassing waarin DC-motoren worden gebruikt, moet er rekening gehouden worden met de temperatuur effecten bij het kiezen van de juiste motor. Wanneer de temperatuur verandert, veranderen de prestaties. Bij het bekijken van DC-motorcurves moet men zich de vraag stellen: “staan deze curves voor de motorprestaties op kamertemperatuur of op de maximale nominale temperatuur?”. Afhankelijk van de temperatuur en het vereiste werkpunt op de motorcurve, kan het prestatieverschil tussen “koud” en “warm” aanzienlijk zijn.
Zodra een motorontwerp is voltooid, inclusief motorafmetingen, magnetische circuits en wikkelingen,
worden verschillende kenmerken die de motorprestaties bepalen “theoretisch” gefixeerd: de
koppelconstante (KT), de spanningsconstante (KE), en de weerstand van de motorklem (Rmt). Deze
drie waarden bepalen het uitgangskoppel, de motorsnelheid, en het resulterende uitgangsvermogen
op elk punt op de motorcurve bij een gegeven klemspanning, evenals de totale helling van de
motorcurve.
Motorconstanten zijn niet écht constant
De koppel- en spanningsconstante worden bepaald tijdens de ontwerpfase en zijn een functie van het algemeen ontwerp van het magnetisch circuit. Ze zijn altijd gelijk bij het gebruik van SI-eenheden. Bijvoorbeeld als motor KT = 0,1 Nm/A, dan is de motor KE = 0,1 V/(rad/s), ervan uitgaande dat Nm en V/(/rad/s) de gebruikte eenheden zijn. De weerstand van de motorklem wordt ook in de ontwerpfase bepaald door het aantal spoelen, het aantal spoelwindingen en de diameter van de magneetdraad. Deze principes zijn van toepassing op zowel borstel- als borstelloze DC-motoren.
De uitdrukking “motorconstanten” is echter enigszins een verkeerde benaming. De Ohmse weerstand van de wikkeling en de fluxdichtheid van de permanentmagneet veranderen als de temperatuur verandert. Als de motor temperatuur toeneemt neemt de motorwikkeling weerstand toe, op basis van de temperatuurcoëfficiënt van koper. De fluxdichtheid van de permanent magneten zal samen met de temperatuur verminderen. Veranderingen in deze 2 hoofdcomponenten van de motor zullen resulteren in een stijging van het onbelast toerental (no load speed) en een daling van het startkoppel, waardoor de helling van de motorcurve verandert. Zodra men dit concept begrijpt, wordt het duidelijk dat de motorprestaties bij kamertemperatuur serieus verschillen van de prestaties bij maximumtemperatuur.
De DC Motor Curve
DC-motor prestatiecurves kunnen voor verschillende omstandigheden ontwikkeld worden.
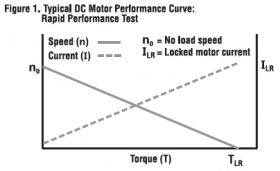
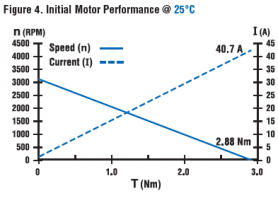
Bijvoorbeeld: de motor curve in afbeelding 1 toont een open-loop-motor die snel getest is (om verwarming te voorkomen) op een dynamometer (koppelmeter). De test wordt gedaan door de motor snel van nullast tot geblokkeerde rotor (stall) te laden, met behulp van een vaste klemspanning van een voeding met lage uitgangsimpedantie. Dit soort test wordt gedaan om een ‘basislijn’ van de motorprestaties op kamertemperatuur te krijgen. Motorsnelheid en -stroom worden als een functie van het koppel uitgezet. Uit deze test en uit een aantal weerstandsmetingen, kunnen de koppelconstante, de spanningsconstante en de eindweerstandswaarden bepaald worden. Deze informatie is erg handig om de basis motorprestaties in te schatten bijvoorbeeld voor een toepassing waarbij de motor maar kort draait en met een lange rustperiode tussen elke werkcyclus Lage duty cycle).
In toepassingen zoals herhaalde bewegingen van punt naar punt, toepassingen die het veelvuldig starten en stoppen van een hoge massatraagheid vereisen, of toepassingen waar de motor gedurende lange tijd draait (zoals bij een ventilator), zijn de motorgegevens van de prestaties bij kamertemperatuur niet voldoende en kan dit leiden tot de keuze van een verkeerde motor of tot een overschrijding van de maximaal toelaatbare temperatuur en het doorbranden van de wikkelingen (of het frequent aanspreken van de thermische beveiliging).
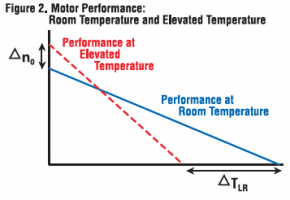
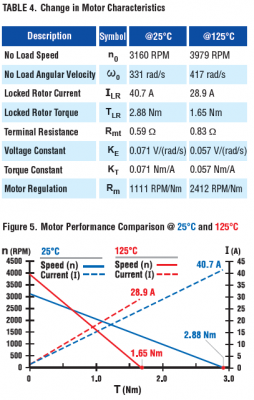
Naarmate de motortemperatuur stijgt, stijgt de weerstand en dalen de koppelconstante en spanningsconstante. Dit resulteert in een toename van de no-load speed en een afname van het startkoppel. Afbeelding 2 illustreert het verschil tussen ‘koude’ en ‘warme’ bedrijfsomstandigheden van dezelfde DC-motor. De ‘warme’ motorcurve laat zien hoeveel de prestaties kunnen veranderen tijdens het gebruik van de motor op een verhoogde temperatuur.
Temperatuureffecten op de weerstand van de motorwikkeling
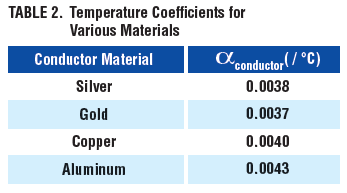
Motorwikkeling weerstand (R_mt) is de hoofdoorzaak van warmteontwikkeling in de motor. Om een elektromotor koppel te laten genereren, moet er stroom door de motorwikkelingen gejaagd worden. Koper is een uitstekende geleider, maar het is niet perfect: materiële fysica en onzuiverheden zullen er voor zorgen dat de atomen sneller trillen naarmate er meer stroom vloeit. Het resultaat is een constante temperatuurstijging van de motorwikkelingen. Alle metalen geleiders hebben een positieve temperatuur-weerstandscoëfficiënt. Dit betekent dat naarmate de temperatuur toeneemt, de weerstand van het materiaal ook toeneemt. Elektromotoren gebruiken meestal koper als geleidingsmateriaal, behalve in speciale gevallen. Veel kooi-ankers (squirrel cages) van inductiemotoren bestaan uit gegoten aluminium vanwege de gemakkelijke productie, maar de overgrote meerderheid van de motoren maakt gebruik van koperdraad.
Tabel 2 geeft voorbeelden van veel gebruikte metalen in elektrische en elektronische apparaten en hun respectievelijke temperatuurcoëfficiënten (α).
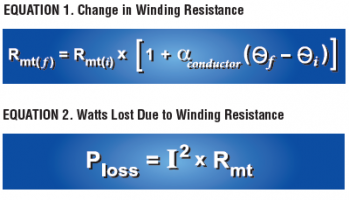
Vergelijkingen 1 en 2 illustreren de relatie tussen wikkelingstemperatuur ( ) , wikkeling weerstand (Rmt) en verloren Watts (P). Hierin is “i” de waarde bij lage temperatuur en “f” die bij hoge temperatuur.
Temperatuureffecten op magnetische fluxdichtheid
De koppelconstante (KT) en de spanningsconstante (KE) zijn direct gerelateerd aan de magnetische
fluxdichtheid (Br) van de permanentmagneten. Afhankelijk van het gebruikte magneetmateriaal, zal
de totale fluxdichtheid met een bepaald percentage veranderen bij een verhoging van de temperatuur.
Als de temperatuur stijgt, zorgen atomaire trillingen er voor dat sommige magnetische momenten
‘randomiseren’, wat resulteert in een afname van magnetische fluxdichtheid.
Ervan uitgaande dat de motor binnen de vooropgestelde grenzen wordt gebruikt, is de afname in fluxdichtheid tijdelijk en begint die zich te herstellen terwijl de magneet afkoelt. Als daarentegen de maximale temperatuurgrens van de magneet overschreden wordt, zal er een gedeeltelijke demagnetisatie plaatsvinden en zullen de motorprestaties voorgoed veranderen.
De waarden in tabel 3 vertegenwoordigen gemiddelde cijfers voor verschillende materiaalklassen. Bepaalde magneetsoorten binnen een materiaalklasse kunnen afwijken van de gegeven waarden hieronder. Sommige soorten van Neodymium bijvoorbeeld, kunnen de opgegeven bedrijfstemperatuur van 150°C overschrijden. De tabel illustreert de relatieve verschillen tussen de temperatuurkarakteristieken van verschillende materialen.
Als er exacte waarden nodig zijn, is het aan te raden om een applicatie-engineer bij de motorfabrikant te raadplegen.
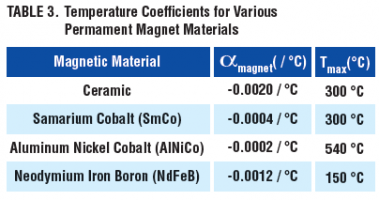
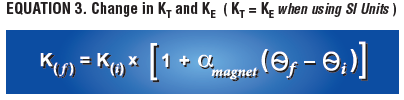
Een veel gestelde vraag is wat de relatie tussen en is bij een verhoogde temperatuur. Als men SI-eenheden gebruikt, zal de ene altijd gelijk zijn aan de andere en zullen ze beiden gelijk veranderen met de temperatuur.
Indien er Engelse eenheden worden gebruikt, worden KT en KE uitgedrukt in oz-in/A (lb-in/A, lb-ft/A,
enz.) en V/krpm. De ene is niet gelijk aan de andere wanneer deze eenheden worden gebruikt, maar
beide grootheden zullen in dezelfde verhouding afnemen bij een verhoogde temperatuur.
Hoe beïnvloedt dit de algemene motorprestaties?
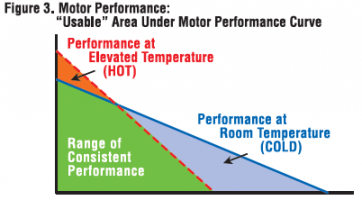
Bij een verhoogde motortemperatuur neemt de helling van de DC-motorcurve toe als gevolg van
een toename in no-load speed en een afname van het startkoppel. Afbeelding 3 illustreert het
oppervlak onder een bepaalde motorcurve dat het bereik van consistente prestaties toont, tussen
kamertemperatuur en de nominale maximum temperatuur.
Een andere term die naar de helling van een DC-motorcurve verwijst is ‘regulatie’. Motor regulatie beschrijft hoeveel de assnelheid zal veranderen bij een bepaalde verandering in de asbelasting, bij een vaste klemspanning. Een vlakkere snelheid-koppel curve resulteert in een kleinere verandering in snelheid bij verhoogde belasting. Als de motortemperatuur toeneemt en de curve steiler wordt, zal de snelheid meer dalen voor dezelfde toename in belasting.
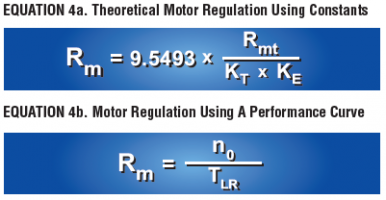
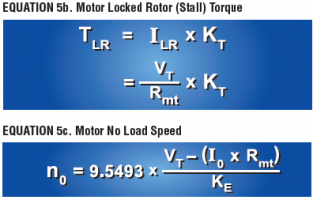
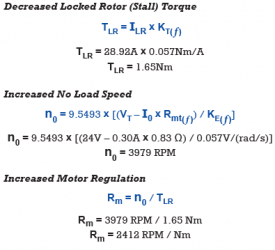
Vergelijkingen 4 en 5 kunnen worden gebruikt om het sterke effect op de motorprestaties te illustreren als gevolg van een afname in magnetische flux en een toename in de weerstand van de motorwikkelingen. In deze vergelijkingen is TLR het koppel bij geblokkeerde rotor.
Hoewel er een hogere no-load speed en een lager startkoppel zullen zijn, is het verschil in ‘koud’ versus ‘warm’ startkoppel groter dan het verschil in ‘koude’ versus ‘warme’ no-load speed.
Het startkoppel is sterk afhankelijk van de weerstand weerstand (Rmt) en van de koppelconstante (KT).
Hoewel de no load speed ook wordt beïnvloed door de hogere weerstand bij een verhoogde temperatuur, heeft de weerstandsfactor een veel kleiner effect op de no load speed. Dit is omdat die vermenigvuldigd wordt met de no load current (I0), een relatief klein getal (zie ook vergelijking 5b en 5c).
De gebruiker moet voorzichtig zijn bij het ontwerpen van het systeem, om er zeker van te zijn dat de assnelheid voldoet aan de minimumspecificatie bij een gegeven belasting bij verhoogde motortemperatuur. In een complexer bewegingssysteem met een closed-loop controller, kan de snelheid binnen een bepaald bereik gecontroleerd worden om ‘vast’ te blijven terwijl de belasting verandert.
In het volgende voorbeeld wordt er van uitgegaan dat de motor gebruikt wordt in een open-loop met een gereguleerde DC klemspanning.
Hoeveel kunnen de motorprestaties veranderen onder een gegeven reeks voorwaarden?
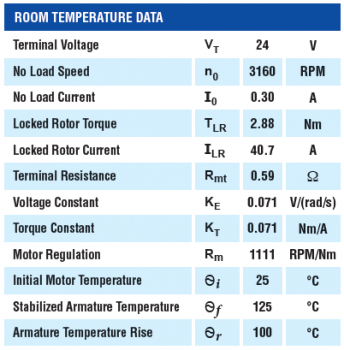
Voorwaarden:
- De initiële motorgegevens werden met behulp van een snelle-dynamometertest bij een kamertemperatuur van 25°C opgesteld;
- De temperatuur van het anker is bij een constante belasting gestabiliseerd tot 125°C;
- Er werd geen koellichaam of geforceerde luchtstroom gebruikt;
- De motor werd in een open-loop gebruikt (geen feedback om het uitgaande vermogen van de as te regelen)
- Voeding gebruikt – gereguleerd, 50A max vermogen met lage uitgangsimpedantie;
- Koperen motorwikkelingen;
- Strontiumferriet (keramische) permanentmagneten.
Bij een verhoging van 100°C van de gestabiliseerde temperatuur van het anker, zal de eindweerstand hoger en de magnetische flux lager zijn vergeleken bij de initiële motortemperatuur van 25°C. Dit zal resulteren in een verandering van van Rmt , KT en KE.
Belangrijke opmerking: de volgende berekeningen gaan ervan uit dat de temperatuur van de permanentmagneten en die van de rotor identiek zijn. Het motoranker (rotor) is het deel van de machine dat elektrische stroom vervoert en het zal altijd een hogere temperatuur hebben dan de permanentmagneten. In de praktijk zijn de feitelijke verandering van K_T en K_E en van de regulatie minder uitgesproken dan wat in het
volgende voorbeeld wordt voorgesteld.

Het is interessant om te zien hoeveel de prestaties zijn veranderd bij een gegeven verhoging van de motortemperatuur. Hoewel de analyse nuttig is om het fenomeen te begrijpen, is het niet absoluut correct.
Er zijn een paar dingen om in gedachten te houden, bijvoorbeeld:
- We gingen uit van een gestabiliseerde stijging van 100°C op alle componenten van de motor. In de praktijk zullen alle onderdelen bij verschillende temperaturen stabiliseren, met het motoranker als warmste.
- De temperatuurcoëfficiënt voor het magnetische materiaal was een gemiddelde dat voor dat materiaal werd gebruikt. In de werkelijkheid hebben de verschillende kwaliteiten van een bepaalde materiaalklasse waarden die enigszins afwijken van het gemiddelde.
- Het echte thermische model van een DC-motor is extreem complex. Het is erg moeilijk om theoretisch exacte waarden te verkrijgen, omdat er gewoon te veel variabelen zijn waar je rekening mee moet houden.
De voorafgaande analyse is echter zeer nuttig om de beperkingen van de motor in een bepaalde toepassing te begrijpen.
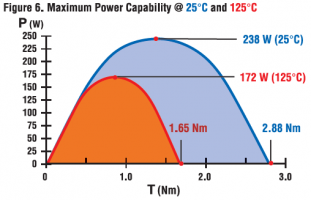
Motorconstanten en maximaal uitgangsvermogen
Een motor wordt zelden of nooit voor lange tijd op maximaal vermogen gebruikt. Met uitzondering van heel kleine motoren met een laagvermogen, kunnen de meesten niet constant op het maximaal vermogen gebruikt worden zonder de maximumtemperatuur te overschrijden. De vergelijkingen hieronder kunnen gebruikt worden om het maximaal uitgangsvermogen en het vermogen op elk punt van de motorcurve te bepalen.
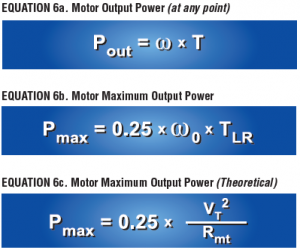
Vergelijkingen 6b en 6c illustreren het effect van de motorweerstand op het uitgangsvermogen van de
machine. Hoewel het intuïtief niet zo lijkt door naar vergelijking 6b te kijken, is een hogere wikkeling
weerstand de hoofdschuldige in het verminderen van het maximale uitgangsvermogen van de motor.
Hoewel de magnetische fluxdichtheid verminderd is bij een verhoogde temperatuur, wordt de afname
van TLR (als gevolg van kleinere KT) gecompenseerd door een toename van ω0 (vanwege kleinere KE).
Als de weerstand gelijk bleef, zou zelfs een afname van de magnetische fluxdichtheid het maximale
uitgangsvermogen van de machine niet significant veranderen.
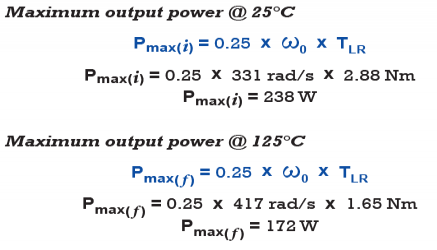
In werkelijkheid vermindert de combinatie van de hogere weerstand Rmt en de lagere magnetische fluxdichtheid (lagere KT) het startkoppel veel meer dan gewoon een reductie in magnetische fluxdichtheid alleen, wat zorgt voor de vermindering van het maximale uitgangsvermogen.
In dit geval is het maximale vermogen bij verhoogde temperatuur ongeveer 70% van dat bij kamertemperatuur. Dit is een belangrijke verandering, en het is een rechtstreeks gevolg van de verhoogde motorweerstand.
Vergelijking 6c geeft resultaten die 1 à 2 % van de getallen hierboven liggen. Deze vergelijking is erg handig om snel het maximale vermogen van gelijk welke DC motor te schatten.
Motorcurves komen in veel variëteiten!
De meeste grafieken van DC motorprestaties tonen minstens 2 curves: snelheid versus koppel en stroom versus koppel. Fabrikanten kunnen deze informatie op verschillende manieren tonen en soms leveren ze ook andere informatie zoals uitgangsvermogen en efficiëntiecurves.
De motorcurve uit figuur 1 verwijdert alle andere variabelen en gaat er van uit dat de motor getest is onder vaste klemspanning met een lage impedantie voeding en dan progressief geladen met een dynamometer. De test wordt zo snel mogelijk uitgevoerd om de stijging van de motortemperatuur te minimaliseren. Als de geteste motor een klein vermogen heeft, kan de dynamometer de motor laden tot dat de assnelheid nul of bijna nul RPM bereikt. Bij grotere motoren kan de dynamometer ingesteld worden om de motor geleidelijk tot het maximaal vermogen te laden. De rest van de curve kan vervolgens worden geëxtrapoleerd. De resulterende gegevens zijn in beide gevallen de (theoretisch) lineaire snelheid versus koppel- en stroom versus koppelcurves.
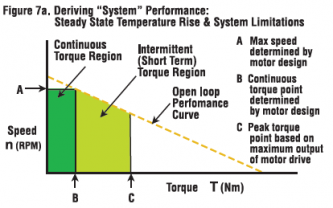
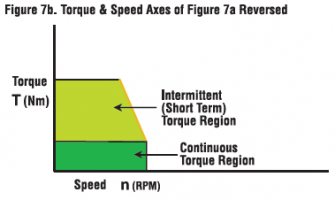
Sommige fabrikanten, met name degene die complete servosystemen leveren, kunnen prestatiecurves presenteren als een ‘blend’ van informatie, inclusief beperkingen op systeemniveau. Deze beperkingen omvatten veel dingen zoals continu stroomvermogen, piekstroomvermogen, aandrijving/versterkervermogen beperkingen, maximale DC-busspanning, maximale motortemperatuurwaarden, motorverzadiging en mechanische snelheidsbeperkingen. Veel fabrikanten zetten het koppel uit op de Y-as en de snelheid op de X-as. De voorbeeldcurven in figuren 7a en 7b tonen hoe gegevens er uit kunnen zien als er rekening wordt gehouden met factoren zoals maximum rotatiesnelheid, maximale temperatuurstijging en piek aandrijfstroom. Het maakt niet uit hoe de gegevens zijn gepubliceerd of welke andere systeemfactoren worden overwogen, de motorparameters R_mt, K_T en K_E, en zijn cruciaal voor het inzicht in de ware mogelijkheden van de motor.
Een andere factor om rekening mee te houden bij het evalueren van prestatiecurves, is dat de werkelijke testomstandigheden niet altijd duidelijk zijn. Verschillende leveranciers kunnen andere informatie geven.
De snelle dynamometer test is erg consistent en biedt een goede basislijn. Het nadeel is dat de resultaten nooit de slechtste omstandigheden vertegenwoordigen.
Als de motoren bij de maximale nominale temperatuur getest worden, zal de gebruiker de motorcapaciteit beter begrijpen bij toepassingen waarbij de temperatuur aanzienlijk hoger dan bij kamertemperatuur stabiliseert.
Het nadeel is dat er veel andere variabelen zijn die de testresultaten kunnen beïnvloeden, zoals de methode van de temperatuurmeting, de motorophanging (koelend effect), de luchtstroom rond de motor, etc.
Sommige fabrikanten testen hun motoren in de slechtst mogelijke omstandigheden: een motor gestabiliseerd op de maximale nominale temperatuur, zonder koeling en zonder geforceerde luchtstroom.
Er bestaan geen strikte richtlijnen die zeggen hoe een fabrikant de prestaties moet presenteren. Het belangrijkste om bij het evalueren van de gegevens te onthouden is: stel de juiste vragen.
Algemene motorconstructie en warmteoverdracht
De mechanische structuur beïnvloedt de warmteoverdrachtseigenschappen van de motor. In een DC motor met commutator en borstels zijn er koperen wikkelingen rond sleuven in het roterende deel van de motor (armatuur of rotor) gewikkeld. De warmte die gegenereerd wordt door de koperen wikkelingen, wordt doorheen de armatuurlaminaten en naar de motor as en lagers geleid. De warmte migreert ook door convectie over de luchtopening naar de permanentmagneten en de behuizing, waar ze uiteindelijk in de omgeving verdwijnt.
In het geval van een borstelloze DC motor zijn de koperen wikkelingen ofwel in sleuven gewikkeld (in een DC motor met sleuven, in het Engels: slotted motors), ofwel tegen een magnetisch achterijzer gevormd (in een DC motor zonder sleuven. Engels: non-slotted motor).Deze constructie zorgt voor een direct thermisch geleidend pad van het warmte genererend koper naar de behuizing, waar de warmte in de omgeving verdwijnt. Bij een borstelloze motor zitten de permanentmagneten namelijk op het roterende deel.
In beide gevallen zal het heel moeilijk -zo niet onmogelijk- zijn om zonder empirisch testen de toename in temperatuur van de individuele componenten te voorspellen. Een ding is zeker: de temperatuurstijging van de componenten (hotspots) van een borstelmotor zal anders zijn dan die van de hotspots van een borstelloze motor.
Er bestaat geen vervanging voor applicatietesten
Het doel van het voorafgaande en van de rekenvoorbeelden is om een beter beeld te krijgen van hoe de motorprestaties mee veranderen met de temperatuur.
Conclusie is:
Er bestaat geen vervanging voor het testen en valideren van de motor onder toepassingsomstandigheden. Een goede theoretische behandeling is niet of nauwelijks haalbaar wegens het grote aantal variabelen en aannames die erbij betrokken zijn. De voorbeeldberekeningen kunnen wel dienen als een eerste benadering om een idee te krijgen van de omvang van de mogelijke verandering.
De beste manier om de motorprestaties onder feitelijke bedrijfsomstandigheden te begrijpen is om de toepassing zo nauwkeurig mogelijk te simuleren en in de loop van de tijd temperatuurgegevens te verzamelen met een data-acquisitiesysteem. De verschillende delen van de motor moeten gemonitord worden met thermometers bevestigd aan de lagers, de wikkelingen (in het geval van een borstelloze motor), de magneten (in geval van een borstelmotor) en de behuizing. Bespreek uw ontwerpcriteria altijd met een applicatie ingenieur.
Laatste nieuws
- 10-12-2024Fijne feestdagen en een gelukkig 2025!
- 13-11-2024Duurzamer met cilinder druksensoren bij grote motoren
- 03-09-2024Bezoek Rotero op WoTS 2024: Ontdek onze innovaties en maatwerkoplossingen - Stand 11A042!
- 26-06-2024Rotero Holland behaalt opnieuw ISO 9001-Certificaat
- 25-06-2024Let op: Bestel op tijd in verband met vakanties!
- 20-06-2024Ontdek de Nieuwe UW100 Onderwater Actuatoren: con35/ icon 35 & con50 / icon50
- 20-02-2024Indumation 2024: Een Schitterend Succes!
- 19-01-2024Ontdek de Innovaties van Rotero op Indumation 2024!
- 04-01-2024Rotero Partner van Tech Guru Explosition
- 13-12-2023Beste Wensen voor een Vrolijk Kerstfeest en een Gelukkig Nieuwjaar 2024!
- 31-10-2023Rotero Holland Participates in the Precision Fair 2023
- 12-10-2023The Power of Compact: Meet the con25 from Concens at Rotero!
Lees meer
Hoofdmenu
Contact
| Rotero Holland |
| Pompmolenlaan 21 |
| 3447 GK Woerden |
| T: +31 (0)348 49 51 50 |
| E: info@rotero.com |
| btw: NL008174210B01 |
| KvK: 30089129 |