
Pour toute application utilisant des moteurs à courant continu, il convient de tenir compte des effets de la température lors du choix du moteur approprié. Lorsque la température change, les performances changent également. Lorsque l’on examine les courbes des moteurs à courant continu, il faut se poser la question suivante: ces courbes représentent-elles les performances du moteur à température ambiante ou à la température nominale maximale? En fonction de la température et du point de fonctionnement requis sur la courbe du moteur, la différence de performances entre froid et chaud peut être considérable.
Une fois la conception du moteur terminée, y compris les dimensions du moteur, les circuits magnétiques et les enroulements,
plusieurs caractéristiques qui déterminent les performances du moteur sont fixées « théoriquement: la
constante de couple (KT), la constante de tension (KE) et la résistance de la borne du moteur (Rmt). Ces trois valeurs déterminent le couple de sortie, la vitesse du moteur et la puissance de sortie résultante à chaque point de la courbe du moteur pour une tension de borne donnée, ainsi que la pente totale de la courbe du moteur.
Les constantes du moteur ne sont pas vraiment constantes
Les constantes de couple et de tension sont déterminées lors de la phase de conception et dépendent de la conception générale du circuit magnétique. Elles sont toujours identiques lorsque l’on utilise les unités SI. Par exemple, si le moteur KT = 0,1 Nm/A, alors le moteur KE = 0,1 V/(rad/s), en supposant que Nm et V/(/rad/s) sont les unités utilisées. La résistance de la borne du moteur est également déterminée lors de la phase de conception par le nombre de bobines, le nombre de spires et le diamètre du fil magnétique. Ces principes s’appliquent aussi bien aux moteurs à courant continu à balais qu’aux moteurs à courant continu sans balais.
Cependant, l’expression « constantes du moteur » est quelque peu impropre. La résistance ohmique du bobinage et la densité de flux de l’aimant permanent varient en fonction de la température. Lorsque la température du moteur augmente, la résistance du bobinage du moteur augmente, sur la base du coefficient de température du cuivre. La densité de flux des aimants permanents diminue avec la température. Les variations de ces deux composants principaux du moteur entraînent une augmentation de la vitesse à vide (no load speed) et une diminution du couple de démarrage, ce qui modifie la pente de la courbe du moteur. Une fois ce concept compris, il apparaît clairement que les performances du moteur à température ambiante diffèrent considérablement de celles obtenues à température maximale.
La courbe du moteur à courant continu
Les courbes de performance des moteurs à courant continu peuvent être développées pour différentes conditions. Par exemple: la courbe du moteur dans l’illustration 1 montre un moteur à boucle ouverte qui a été testé rapidement (pour éviter toute surchauffe) sur un dynamomètre (couplemètre). Le test est effectué en chargeant rapidement le moteur de zéro à plein régime (calage), à l’aide d’une tension de serrage fixe provenant d’une alimentation à faible impédance de sortie. Ce type de test est effectué afin d’obtenir une base de référence des performances du moteur à température ambiante. La vitesse et le courant du moteur sont représentés en fonction du couple. À partir de ce test et d’une série de mesures de résistance, il est possible de déterminer la constante de couple, la constante de tension et les valeurs de résistance finale. Ces informations sont très utiles pour estimer les performances de base du moteur, par exemple pour une application dans laquelle le moteur ne tourne que pendant une courte période et avec une longue période de repos entre chaque cycle de travail (cycle de service faible).

Dans les applications telles que les mouvements répétitifs d’un point à un autre, les applications qui nécessitent des démarrages et des arrêts fréquents d’une inertie élevée, ou les applications où le moteur tourne pendant une longue période (comme dans le cas d’un ventilateur), les données du moteur relatives aux performances à température ambiante ne sont pas suffisantes et peuvent conduire au choix d’un moteur inadapté ou à un dépassement de la température maximale admissible et à la combustion des enroulements (ou le déclenchement fréquent du dispositif de protection thermique).
À mesure que la température du moteur augmente, la résistance augmente et les constantes de couple et de tension diminuent. Il en résulte une augmentation de la vitesse à vide et une diminution du couple de démarrage. La figure 2 illustre la différence entre les conditions de fonctionnement à froid et à chaud du même moteur à courant continu. La courbe du moteur « chaud » montre à quel point les performances peuvent varier lorsque le moteur est utilisé à une température élevée.

Effets de la température sur la résistance du bobinage du moteur
La résistance des enroulements du moteur (R_mt) est la principale cause de l’échauffement du moteur. Pour qu’un moteur électrique génère un couple, un courant doit circuler dans les enroulements du moteur. Le cuivre est un excellent conducteur, mais il n’est pas parfait : la physique des matériaux et les impuretés font que les atomes vibrent plus rapidement à mesure que le courant augmente. Il en résulte une augmentation constante de la température des enroulements du moteur. Tous les conducteurs métalliques ont un coefficient de résistance thermique positif. Cela signifie que lorsque la température augmente, la résistance du matériau augmente également. Les moteurs électriques utilisent généralement le cuivre comme matériau conducteur, sauf dans des cas particuliers. De nombreux induits à cage d’écureuil (squirrel cages) des moteurs à induction sont en aluminium moulé en raison de leur facilité de fabrication, mais la grande majorité des moteurs utilisent du fil de cuivre.
Le tableau 2 donne des exemples de métaux couramment utilisés dans les appareils électriques et électroniques et leurs coefficients de température respectifs (α).

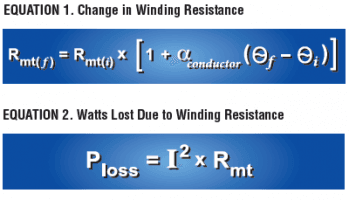
Les équations 1 et 2 illustrent la relation entre la température de l’enroulement ( ), la résistance de l’enroulement (Rmt) et la puissance dissipée (P). Dans ces équations, i est la valeur à basse température et f la valeur à haute température.
Effets de la température sur la densité du flux magnétique
La constante de couplage (KT) et la constante de tension (KE) sont directement liées à la densité de flux magnétique (Br) des aimants permanents. En fonction du matériau magnétique utilisé, la densité de flux totale variera d’un certain pourcentage lorsque la température augmente. Lorsque la température augmente, les vibrations atomiques provoquent une randomisation de certains moments magnétiques, ce qui entraîne une diminution de la densité du flux magnétique.
En supposant que le moteur soit utilisé dans les limites spécifiées, la diminution de la densité de flux est temporaire et commence à se rétablir lorsque l’aimant refroidit. En revanche, si la limite de température maximale de l’aimant est dépassée, une démagnétisation partielle se produira et les performances du moteur seront modifiées de façon permanente.
Les valeurs indiquées dans le tableau 3 représentent des moyennes pour différentes classes de matériaux. Certains types d’aimants d’une même classe de matériaux peuvent s’écarter des valeurs indiquées ci-dessous. Certains types de néodyme, par exemple, peuvent dépasser la température de fonctionnement spécifiée de 150 °C. Le tableau illustre les différences relatives entre les caractéristiques thermiques de différents matériaux.
Si des valeurs exactes sont nécessaires, il est recommandé de consulter un ingénieur d’application auprès du fabricant du moteur.


Une question fréquemment posée concerne la relation entre et à température élevée. Si l’on utilise les unités SI, l’une sera toujours égale à l’autre et elles varieront toutes deux de manière identique avec la température.
Si des unités anglaises sont utilisées, KT et KE sont exprimés en oz-in/A (lb-in/A, lb-ft/A,
etc.) et V/krpm. L’un n’est pas égal à l’autre lorsque ces unités sont utilisées, mais
les deux grandeurs diminueront dans les mêmes proportions à une température élevée.
Comment cela affecte-t-il les performances générales du moteur?
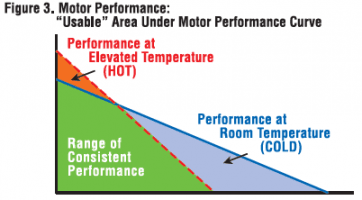
Lorsque la température du moteur augmente, la pente de la courbe du moteur à courant continu augmente en raison d’une augmentation de la vitesse à vide et d’une diminution du couple de démarrage. La figure 3 illustre la surface sous une courbe moteur donnée qui montre la plage de performances constantes, entre la température ambiante et la température maximale nominale.
Un autre terme qui fait référence à la pente d’une courbe de moteur à courant continu est régulation. La régulation du moteur décrit dans quelle mesure la vitesse de l’arbre va changer en cas de variation donnée de la charge sur l’arbre, pour une tension de serrage fixe. Une courbe vitesse-couple plus plate entraîne une variation de vitesse moins importante en cas d’augmentation de la charge. Si la température du moteur augmente et que la courbe devient plus raide, la vitesse diminuera davantage pour une même augmentation de la charge.

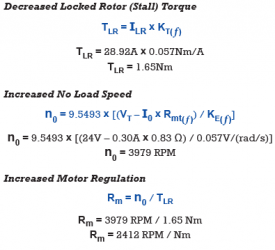
Les équations 4 et 5 peuvent être utilisées pour illustrer l’effet important sur les performances du moteur résultant d’une diminution du flux magnétique et d’une augmentation de la résistance des enroulements du moteur. Dans ces équations, TLR est le couple à rotor bloqué.
Bien que la vitesse à vide soit plus élevée et le couple de démarrage plus faible, la différence entre le couple de démarrage à froid et à chaud est plus importante que la différence entre la vitesse à vide à froid et à chaud.
Le couple de démarrage dépend fortement de la résistance (Rmt) et de la constante de couple (KT).
Bien que la vitesse à vide soit également influencée par la résistance plus élevée à une température plus élevée, le facteur de résistance a un effet beaucoup plus faible sur la vitesse à vide. En effet, celui-ci est multiplié par le courant à vide (I0), un nombre relativement faible (voir également les équations 5b et 5c).


L’utilisateur doit faire preuve de prudence lors de la conception du système afin de s’assurer que la vitesse de l’arbre respecte les spécifications minimales pour une charge donnée à une température moteur élevée. Dans un système de mouvement plus complexe équipé d’un contrôleur en boucle fermée, la vitesse peut être contrôlée dans une certaine plage afin de rester fixe lorsque la charge varie.
Dans l’exemple suivant, on suppose que le moteur est utilisé en boucle ouverte avec une tension de bornes CC régulée.
Dans quelle mesure les performances du moteur peuvent-elles varier dans un ensemble de conditions données?
Conditions:
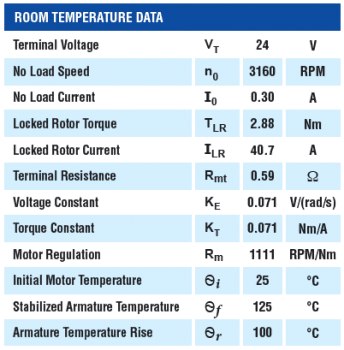
- Les données initiales du moteur ont été établies à l’aide d’un test dynamométrique rapide à une température ambiante de 25 °C.
- La température de l’ancrage est stabilisée à 125 °C sous une charge constante;
- Aucun dissipateur thermique ni flux d’air forcé n’a été utilisé;
- Le moteur a été utilisé en boucle ouverte (sans rétroaction pour réguler la puissance sortante de l’arbre).
- Alimentation utilisée – régulée, puissance maximale de 50 A avec faible impédance de sortie;
- Bobinages de moteur en cuivre;
- Aimants permanents en ferrite de strontium (céramique).

Avec une augmentation de 100 °C de la température stabilisée de l’induit, la résistance finale sera plus élevée et le flux magnétique plus faible par rapport à la température initiale du moteur de 25 °C. Cela entraînera une modification de Rmt , KT et KE.
Remarque importante: les calculs suivants partent du principe que la température des aimants permanents et celle du rotor sont identiques. L’induit du moteur (rotor) est la partie de la machine qui transporte le courant électrique et sa température sera toujours supérieure à celle des aimants permanents. Dans la pratique, les variations réelles de K_T et K_E et de la régulation sont moins prononcées que celles présentées dans l’exemple suivant.


Il est intéressant de voir à quel point les performances ont changé pour une augmentation donnée de la température du moteur. Bien que l’analyse soit utile pour comprendre le phénomène, elle n’est pas tout à fait correcte. Il y a quelques éléments à garder à l’esprit, par exemple:
- Nous sommes partis d’une augmentation stabilisée de 100 °C sur tous les composants du moteur. Dans la pratique, tous les composants se stabiliseront à des températures différentes, l’induit du moteur étant le plus chaud.
- Le coefficient de température pour le matériau magnétique était une moyenne utilisée pour ce matériau. En réalité, les différentes qualités d’une classe de matériaux donnée ont des valeurs qui s’écartent légèrement de la moyenne.
- Le modèle thermique réel d’un moteur à courant continu est extrêmement complexe. Il est très difficile d’obtenir des valeurs théoriques exactes, car il y a tout simplement trop de variables à prendre en compte.
L’analyse préalable est toutefois très utile pour comprendre les limites du moteur dans une application donnée.
Constantes du moteur et puissance maximale de sortie
Un moteur est rarement, voire jamais, utilisé à pleine puissance pendant une longue période. À l’exception des très petits moteurs à faible puissance, la plupart ne peuvent pas fonctionner en permanence à pleine puissance sans dépasser la température maximale. Les équations ci-dessous peuvent être utilisées pour déterminer la puissance de sortie maximale et la puissance à chaque point de la courbe du moteur.

Les équations 6b et 6c illustrent l’effet de la résistance du moteur sur la puissance de sortie de la machine. Bien que cela ne semble pas intuitif à première vue en regardant l’équation 6b, une résistance d’enroulement plus élevée est le principal facteur responsable de la réduction de la puissance de sortie maximale du moteur.
Bien que la densité du flux magnétique diminue à une température plus élevée, la diminution
du TLR (due à un KT plus faible) est compensée par une augmentation de ω0 (due à un KE plus faible).
Si la résistance restait la même, même une diminution de la densité du flux magnétique ne modifierait pas de manière significative la puissance maximale de sortie de la machine.
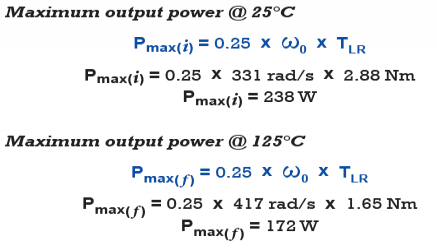
En réalité, la combinaison d’une résistance Rmt plus élevée et d’une densité de flux magnétique plus faible (KT inférieur) réduit le couple de démarrage bien plus qu’une simple réduction de la densité de flux magnétique, ce qui entraîne une diminution de la puissance de sortie maximale.
Dans ce cas, la puissance maximale à température élevée est d’environ 70 % de celle à température ambiante. Il s’agit d’un changement important, qui résulte directement de l’augmentation de la résistance du moteur. L’équation 6c donne des résultats supérieurs de 1 à 2 % aux chiffres ci-dessus. Cette équation est très utile pour estimer rapidement la puissance maximale de n’importe quel moteur à courant continu.

Les courbes de puissance des moteurs sont très variées!
La plupart des graphiques représentant les performances des moteurs à courant continu présentent au moins deux courbes: vitesse en fonction du couple et courant en fonction du couple. Les fabricants peuvent présenter ces informations de différentes manières et fournissent parfois d’autres informations telles que la puissance de sortie et les courbes d’efficacité.
La courbe moteur de la figure 1 élimine toutes les autres variables et part du principe que le moteur a été testé sous une tension de serrage fixe avec une alimentation à faible impédance, puis chargé progressivement à l’aide d’un dynamomètre. Le test est effectué aussi rapidement que possible afin de minimiser l’augmentation de la température du moteur. Si le moteur testé a une faible puissance, le dynamomètre peut le charger jusqu’à ce que la vitesse de l’arbre atteigne zéro ou presque zéro tr/min. Pour les moteurs plus puissants, le dynamomètre peut être réglé pour charger progressivement le moteur jusqu’à sa puissance maximale. Le reste de la courbe peut ensuite être extrapolé. Dans les deux cas, les données obtenues sont les courbes (théoriquement) linéaires de vitesse en fonction du couple et de courant en fonction du couple.
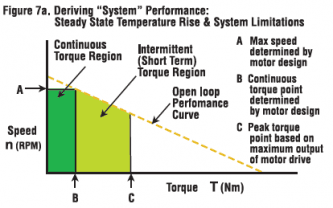
Certains fabricants, en particulier ceux qui fournissent des systèmes servo complets, peuvent présenter les courbes de performance sous forme d’un « mélange » d’informations, y compris les limitations au niveau du système. Ces limitations comprennent de nombreux éléments tels que la puissance continue, la puissance de crête, les limitations de puissance de l’entraînement/amplificateur, la tension maximale du bus CC, les valeurs maximales de température du moteur, la saturation du moteur et les limitations de vitesse mécanique. De nombreux fabricants représentent le couple sur l’axe Y et la vitesse sur l’axe X. Les courbes d’exemple des figures 7a et 7b montrent à quoi peuvent ressembler les données lorsque des facteurs tels que la vitesse de rotation maximale, l’élévation maximale de température et le courant d’entraînement de crête sont pris en compte. Peu importe la manière dont les données sont publiées ou les autres facteurs système pris en compte, les paramètres du moteur R_mt, K_T et K_E, et sont essentiels pour comprendre les véritables capacités du moteur.

Un autre facteur à prendre en compte lors de l’évaluation des courbes de performance est que les conditions réelles des tests ne sont pas toujours claires. Différents fournisseurs peuvent fournir des informations différentes. Le test rapide au dynamomètre est très cohérent et offre une bonne base de référence. L’inconvénient est que les résultats ne représentent jamais les pires conditions.
Si les moteurs sont testés à leur température nominale maximale, l’utilisateur comprendra mieux la capacité du moteur dans les applications où la température se stabilise à un niveau nettement supérieur à la température ambiante.
L’inconvénient est qu’il existe de nombreuses autres variables qui peuvent influencer les résultats des tests, telles que la méthode de mesure de la température, la suspension du moteur (effet de refroidissement), le flux d’air autour du moteur, etc.
Certains fabricants testent leurs moteurs dans les pires conditions possibles : un moteur stabilisé à la température nominale maximale, sans refroidissement et sans flux d’air forcé.
Il n’existe pas de directives strictes sur la manière dont un fabricant doit présenter les performances. La chose la plus importante à retenir lors de l’évaluation des données est la suivante : posez les bonnes questions.
Construction générale du moteur et transfert thermique
La structure mécanique influence les propriétés de transfert thermique du moteur. Dans un moteur à courant continu avec commutateur et balais, des enroulements en cuivre sont enroulés autour de fentes dans la partie rotative du moteur (induit ou rotor). La chaleur générée par les enroulements en cuivre est conduite à travers les lamelles de l’induit vers l’arbre et les roulements du moteur. La chaleur migre également par convection à travers l’ouverture d’aération vers les aimants permanents et le boîtier, où elle finit par se dissiper dans l’environnement.
Dans le cas d’un moteur à courant continu sans balais, les enroulements en cuivre sont soit enroulés dans des fentes (dans un moteur à courant continu à fentes, en anglais : slotted motors), soit formés contre un fer magnétique arrière (dans un moteur à courant continu sans fentes, en anglais : non-slotted motor). Cette construction assure un cheminement thermique direct entre le cuivre générateur de chaleur et le boîtier, où la chaleur est dissipée dans l’environnement. Dans un moteur sans balais, les aimants permanents sont en effet situés sur la partie rotative.
Dans les deux cas, il sera très difficile, voire impossible, de prédire l’augmentation de température des composants individuels sans tests empiriques. Une chose est sûre : l’augmentation de température des composants (points chauds) d’un moteur à balais sera différente de celle des points chauds d’un moteur sans balais.
Il n’existe aucun substitut aux tests d’application.
L’objectif de ce qui précède et des exemples de calcul est de mieux comprendre comment les performances du moteur varient en fonction de la température.
Conclusion:
Il n’existe aucun substitut aux essais et à la validation du moteur dans les conditions d’utilisation. Une bonne analyse théorique est difficile, voire impossible à réaliser en raison du grand nombre de variables et d’hypothèses impliquées. Les exemples de calculs peuvent toutefois servir d’approche initiale pour se faire une idée de l’ampleur du changement possible.
La meilleure façon de comprendre les performances du moteur dans des conditions réelles d’utilisation est de simuler l’application aussi précisément que possible et de collecter des données de température au fil du temps à l’aide d’un système d’acquisition de données. Les différentes parties du moteur doivent être surveillées à l’aide de thermomètres fixés aux roulements, aux enroulements (dans le cas d’un moteur sans balais), aux aimants (dans le cas d’un moteur à balais) et au boîtier. Discutez toujours de vos critères de conception avec un ingénieur d’application.


