Les courbes caractéristiques d’un moteur donné sont des graphiques qui nous permettent de déterminer le couple produit à une vitesse spécifique. Ce blog explique les courbes caractéristiques des moteurs à courant continu et comment nous pouvons les utiliser pour sélectionner un moteur adapté à une application. Une distinction est faite entre un moteur à courant continu classique (avec balais) et un moteur sans balais .
Lorsque nous lisons les courbes caractéristiques d’un moteur à courant continu à balais, nous partons du principe que nous avons besoin d’un certain couple pour déplacer une charge. Pour un couple donné, ces courbes indiquent la vitesse de rotation correspondante, à partir de laquelle nous pouvons ensuite déterminer l’appel de courant momentané.
La figure ci-dessous montre les courbes caractéristiques d’un moteur à courant continu typique (à balais !).
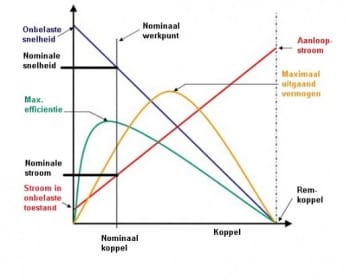
Figure 1. Courbes caractéristiques d’un moteur à courant continu à balais
A titre d’exemple, pour le moteur de la figure 2, délivrant un couple de 25 mNm, la vitesse correspondante est de 2000 tr/min, à laquelle le moteur consomme environ 0,76A de courant. Ce graphique nous indique également que ce couple, cette vitesse et cette puissance ne sont pas des valeurs optimales pour ce type de moteur. En effet, les valeurs nominales (c’est-à-dire optimales) s’appliquent lorsque le moteur fonctionne à un rendement plus ou moins maximal. Cependant, dans la pratique, le point de fonctionnement du moteur ne coïncide pas toujours avec ces valeurs, et le rendement est alors plus faible, de sorte que les moteurs fonctionnent souvent plus chaudement que prévu.
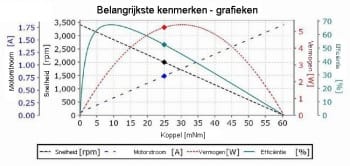
Figure 2. Principales caractéristiques d’un moteur à courant continu à balais
Outre le couple, la tension aux bornes de l’induit (les bobines) du moteur a également une influence sur la vitesse réelle. Cet effet est illustré par la figure 3.
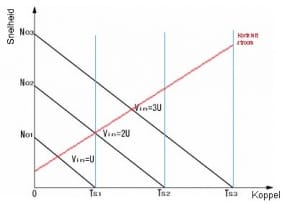
Figure 3. Relation entre la tension d’induit, le couple et la vitesse
Cela signifie que pour un induit donné, la vitesse (et en même temps le couple) peut être augmentée en augmentant la tension à travers l’induit. Cependant, le rendement réduit à cette vitesse plus élevée entraîne une augmentation rapide de la température. C’est pourquoi il est important de garder à l’esprit le cycle de fonctionnement lors de l’augmentation de la tension.
À une tension plus basse, le moteur tournera plus lentement. Cet effet est utile pour réduire le bruit du moteur – et celui de la boîte de vitesses (s’il y en a une).
Moteurs à courant continu sans balais
Les moteurs sans balais sont beaucoup plus faciles à utiliser pour l’utilisateur. Ces moteurs sont toujours dotés d’une électronique de commande qui régule des aspects tels que le courant traversant l’induit (et donc le couple produit par le moteur). Au-delà d’une certaine vitesse, la tension est trop faible pour surmonter la CEM inverse, et le couple produit diminue. Cet effet est illustré par la figure 4.
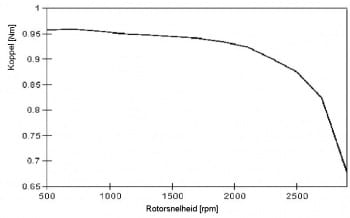
Figure 4 : Courbe couple-vitesse d’un moteur à courant continu sans balais
Comme le courant de ce type de moteur est contrôlé électroniquement, il offre également la possibilité de faire fonctionner le moteur en « survitesse » pendant une courte période. Un courant plus élevé est alors fourni, parfois plus de trois fois le courant nominal. Bien entendu, cela génère beaucoup plus de chaleur. C’est pourquoi tout moteur qui tourne fréquemment en « survitesse » pendant son cycle de fonctionnement a également une durée de fonctionnement admissible beaucoup plus courte.
À des vitesses extrêmement faibles, le contrôleur de moteur ne fonctionne pas très bien. En particulier, dans les moteurs à faible nombre de pôles, la fluctuation du couple par tour à faible vitesse est si importante qu’un mouvement régulier devient impossible. La limite inférieure de ces moteurs se situe à environ 1/8 de la vitesse nominale. Si une vitesse encore plus faible est nécessaire, la solution consiste à utiliser un réducteur.
Le catalogue du fournisseur présente souvent une représentation quelque peu « idéalisée » des caractéristiques du moteur. Ceux qui en sont conscients ne s’aventureront pas trop près des limites inférieures et supérieures.
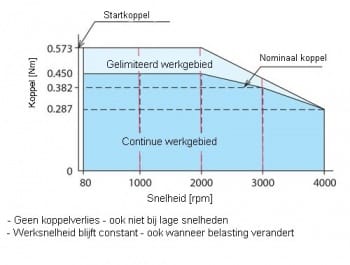
Figure 5 : Rapport de vitesse entre les hautes et les basses vitesses avec un couple plat